




1. ਵਾਲਵ ਕੋਰ ਅਸੈਂਬਲੀ ਪ੍ਰਕਿਰਿਆ ਵਿੱਚ ਮੁਸ਼ਕਲਾਂ
ਇਸ ਅਧਿਐਨ ਵਿੱਚ, ਹੋਰ ਆਟੋਮੈਟਿਕ ਅਸੈਂਬਲੀ ਪ੍ਰਣਾਲੀਆਂ ਦੇ ਡਿਜ਼ਾਈਨ ਅਨੁਭਵ ਨੂੰ ਗ੍ਰਹਿਣ ਕਰਨ ਤੋਂ ਬਾਅਦ, ਮੌਜੂਦਾ ਅਰਧ-ਆਟੋਮੈਟਿਕ ਅਸੈਂਬਲੀ ਪ੍ਰਣਾਲੀ ਦਾ ਵਿਸ਼ਲੇਸ਼ਣ ਕੀਤਾ ਗਿਆ ਸੀ, ਅਤੇ ਸਿਸਟਮ ਦੇ ਮਕੈਨੀਕਲ ਹਿੱਸੇ ਨੂੰ ਪੂਰੀ ਤਰ੍ਹਾਂ ਦੇ ਸਿਮੂਲੇਸ਼ਨ ਦੇ ਅਧਾਰ ਤੇ ਡਿਜ਼ਾਈਨ ਕੀਤਾ ਗਿਆ ਸੀ।ਵਾਲਵ ਕੋਰਅਸੈਂਬਲੀ ਪ੍ਰਕਿਰਿਆ। ਸਿਸਟਮ ਡਿਜ਼ਾਈਨ ਯੋਜਨਾ ਵਿੱਚ, ਅਸੀਂ ਮਕੈਨੀਕਲ ਹਿੱਸਿਆਂ ਦੀ ਪ੍ਰੋਸੈਸਿੰਗ ਨੂੰ ਸੁਵਿਧਾਜਨਕ ਬਣਾਉਣ, ਲਾਗਤ ਨੂੰ ਘੱਟ ਤੋਂ ਘੱਟ ਕਰਨ, ਹਿੱਸਿਆਂ ਦੀ ਅਸੈਂਬਲੀ ਨੂੰ ਸਰਲ ਅਤੇ ਆਸਾਨ ਬਣਾਉਣ, ਅਤੇ ਸਿਸਟਮ ਦੀ ਭਰੋਸੇਯੋਗਤਾ ਅਤੇ ਕੁਸ਼ਲਤਾ ਨੂੰ ਵਧਾਉਣ ਲਈ, ਸਿਸਟਮ ਨੂੰ ਇੱਕ ਖਾਸ ਹੱਦ ਤੱਕ ਖੁੱਲ੍ਹਾਪਣ ਅਤੇ ਵਿਸਤਾਰਯੋਗਤਾ ਦੇਣ ਦੀ ਕੋਸ਼ਿਸ਼ ਕਰਦੇ ਹਾਂ। , ਅਤੇ ਸਿਸਟਮ ਦੀ ਲਾਗਤ ਪ੍ਰਦਰਸ਼ਨ ਨੂੰ ਬਿਹਤਰ ਬਣਾਉਣ ਲਈ ਇੱਕ ਚੰਗੀ ਨੀਂਹ ਰੱਖਦੇ ਹਾਂ।
ਦਵਾਲਵਕੋਰਅਸੈਂਬਲੀ ਸਿਸਟਮ ਨੂੰ ਇਸਦੇ ਮਕੈਨੀਕਲ ਢਾਂਚੇ ਦੇ ਡਿਜ਼ਾਈਨ ਦੇ ਰੂਪ ਵਿੱਚ ਮੁੱਖ ਤੌਰ 'ਤੇ ਤਿੰਨ ਹਿੱਸਿਆਂ ਵਿੱਚ ਵੰਡਿਆ ਗਿਆ ਹੈ, ਅਰਥਾਤ: ਵਰਕਬੈਂਚ ਦੇ ਉੱਪਰਲੇ ਖੱਬੇ ਕੋਨੇ 'ਤੇ ਦੋ ਅਸੈਂਬਲੀ ਹਿੱਸੇ, ਹੇਠਲੇ ਖੱਬੇ ਕੋਨੇ 'ਤੇ ਤਿੰਨ ਅਸੈਂਬਲੀ ਹਿੱਸੇ ਅਤੇ ਵਰਕਬੈਂਚ ਹਿੱਸੇ ਦੇ ਸੱਜੇ ਪਾਸੇ ਸੱਤ ਅਸੈਂਬਲੀ ਹਿੱਸੇ। ਦੋ-ਟੁਕੜੇ ਵਾਲੀ ਅਸੈਂਬਲੀ ਦੀ ਤਕਨੀਕੀ ਮੁਸ਼ਕਲ ਇਸ ਵਿੱਚ ਹੈ ਕਿ ਸੀਲਿੰਗ ਰਿੰਗ ਦੇ ਗੋਲ ਆਕਾਰ ਨੂੰ ਕਿਵੇਂ ਯਕੀਨੀ ਬਣਾਇਆ ਜਾਵੇ। ਕੱਟਣ ਦੀ ਪ੍ਰਕਿਰਿਆ ਦੌਰਾਨ, ਇਹ ਬਲੇਡ ਦੇ ਧੁਰੀ ਐਕਸਟਰੂਜ਼ਨ ਫੋਰਸ ਦੇ ਅਧੀਨ ਹੋਵੇਗਾ, ਇਸ ਲਈ ਇਸਨੂੰ ਵਿਗਾੜਨਾ ਆਸਾਨ ਹੈ। ਦੂਜਾ, ਅਸੈਂਬਲੀ ਪ੍ਰਕਿਰਿਆ ਦੌਰਾਨ, ਜਦੋਂ ਟ੍ਰਾਂਸਫਰ ਟੂਲਿੰਗ ਕੰਪੋਨੈਂਟ 'ਤੇ ਇੱਕ ਕੋਰਡ ਰਾਡ ਦਾ ਪਤਾ ਲਗਾਇਆ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਵਾਈਬ੍ਰੇਸ਼ਨ ਦੁਆਰਾ ਦਰਵਾਜ਼ੇ ਦੇ ਕੋਰ ਦੇ ਵੱਖ-ਵੱਖ ਹਿੱਸਿਆਂ ਵਿਚਕਾਰ ਸਕ੍ਰੀਨਿੰਗ ਅਤੇ ਅਸੈਂਬਲੀ ਨੂੰ ਮਹਿਸੂਸ ਕਰਨਾ ਜ਼ਰੂਰੀ ਹੁੰਦਾ ਹੈ। ਇਸ ਲਈ, ਹਰੇਕ ਕੰਪੋਨੈਂਟ ਅਸੈਂਬਲੀ ਲਿੰਕ ਬਣਨ ਲਈ ਅਨੁਸਾਰੀ ਸਥਿਤੀ ਵਿੱਚ ਆਉਂਦਾ ਹੈ। ਪ੍ਰਕਿਰਿਆ ਦੀ ਮੁਸ਼ਕਲ ਇਸ ਵਿੱਚ ਹੈ। ਉਪਰੋਕਤ ਸਮੱਸਿਆਵਾਂ ਇਸ ਪੜਾਅ 'ਤੇ ਵਾਲਵ ਕੋਰ ਅਸੈਂਬਲੀ ਵਿੱਚ ਨੁਕਸਦਾਰ ਉਤਪਾਦ ਦਰ ਵਿੱਚ ਵਾਧੇ ਦੇ ਮੁੱਖ ਕਾਰਨ ਹਨ। ਇਸਦੇ ਅਧਾਰ 'ਤੇ, ਇਹ ਪੇਪਰ ਵਾਲਵ ਕੋਰ ਅਸੈਂਬਲੀ ਦੀ ਪ੍ਰਕਿਰਿਆ ਨੂੰ ਅਨੁਕੂਲ ਬਣਾਉਂਦਾ ਹੈ, ਅਤੇ ਵਾਲਵ ਕੋਰ ਅਸੈਂਬਲੀ ਦੀ ਯੋਗਤਾ ਦਰ ਨੂੰ ਬਿਹਤਰ ਬਣਾਉਣ ਲਈ ਇੱਕ ਗੁਣਵੱਤਾ ਨਿਰੀਖਣ ਪ੍ਰਣਾਲੀ ਜੋੜਦਾ ਹੈ।
2. ਇੰਟੈਲੀਜੈਂਟ ਵਾਲਵ ਕੋਰ ਅਸੈਂਬਲੀ ਸਕੀਮ
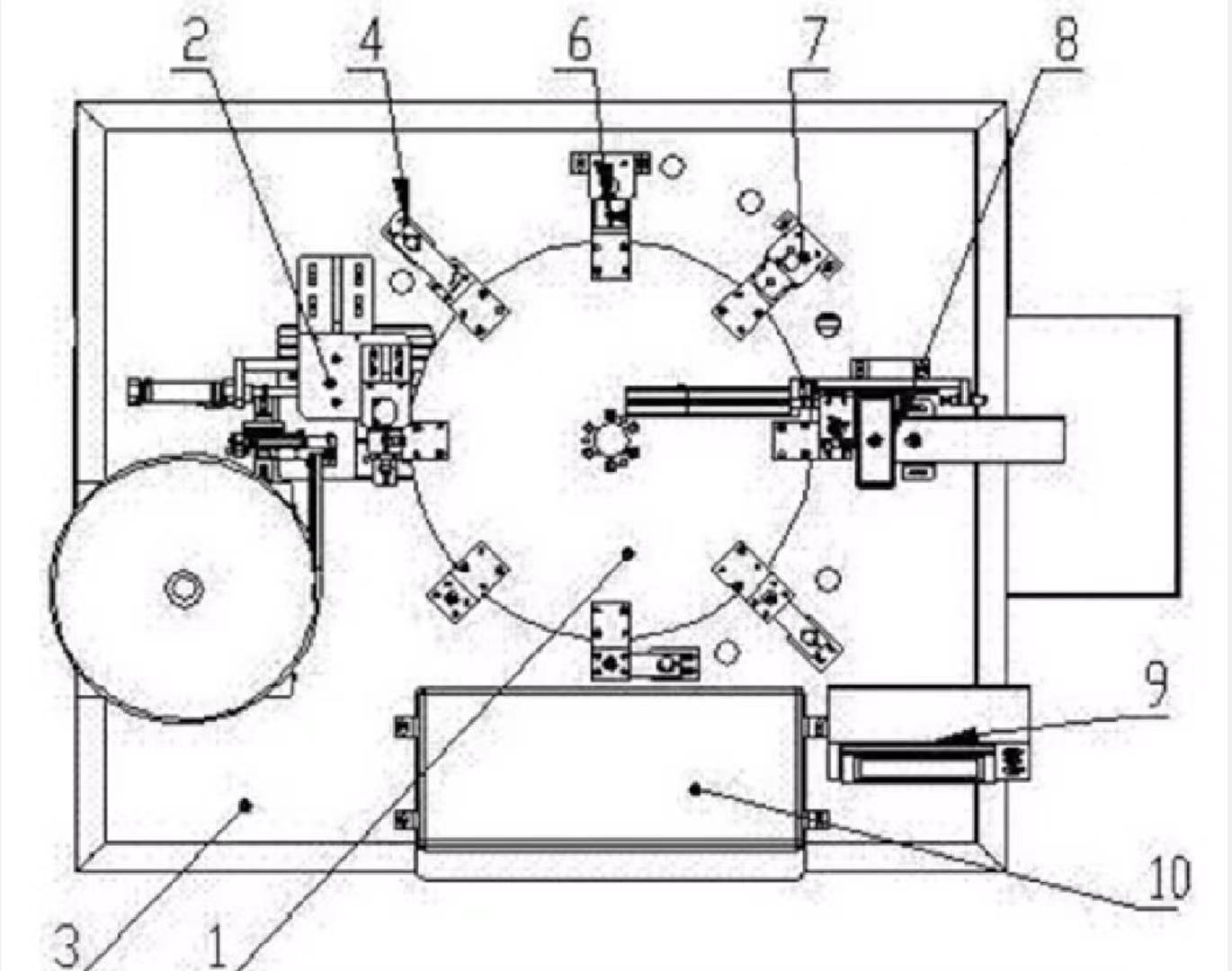
ਓਪਰੇਸ਼ਨ ਇੰਟਰਫੇਸ ਅਤੇ PLC ਇੱਕ ਲਾਜਿਕ ਕੰਟਰੋਲ ਹਿੱਸਾ ਬਣਾਉਂਦੇ ਹਨ, ਅਤੇ ਡਿਟੈਕਸ਼ਨ ਸਿਸਟਮ ਅਤੇ PLC ਵਿੱਚ ਅਸੈਂਬਲੀ ਸਿਸਟਮ ਦੇ ਸਟੇਟਸ ਡੇਟਾ ਨੂੰ ਇਕੱਠਾ ਕਰਨ ਅਤੇ ਕੰਟਰੋਲ ਸਿਗਨਲ ਨੂੰ ਆਉਟਪੁੱਟ ਕਰਨ ਲਈ ਦੋ-ਪੱਖੀ ਜਾਣਕਾਰੀ ਪ੍ਰਵਾਹ ਹੁੰਦਾ ਹੈ। ਐਗਜ਼ੀਕਿਊਟਿਵ ਹਿੱਸੇ ਦੇ ਰੂਪ ਵਿੱਚ, ਡਰਾਈਵ ਸਿਸਟਮ ਸਿੱਧੇ PLC ਆਉਟਪੁੱਟ ਹਿੱਸੇ ਦੁਆਰਾ ਨਿਯੰਤਰਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ। ਫੀਡਿੰਗ ਸਿਸਟਮ ਨੂੰ ਛੱਡ ਕੇ, ਜਿਸਨੂੰ ਮੈਨੂਅਲ ਸਹਾਇਤਾ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ, ਇਸ ਸਿਸਟਮ ਵਿੱਚ ਹੋਰ ਪ੍ਰਕਿਰਿਆਵਾਂ ਨੇ ਬੁੱਧੀਮਾਨ ਅਸੈਂਬਲੀ ਨੂੰ ਮਹਿਸੂਸ ਕੀਤਾ ਹੈ। ਟੱਚ ਸਕ੍ਰੀਨ ਦੁਆਰਾ ਚੰਗੀ ਮਨੁੱਖੀ-ਕੰਪਿਊਟਰ ਇੰਟਰੈਕਸ਼ਨ ਪ੍ਰਾਪਤ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। ਮਕੈਨੀਕਲ ਡਿਜ਼ਾਈਨ ਵਿੱਚ ਓਪਰੇਸ਼ਨ ਦੀ ਸਹੂਲਤ ਨੂੰ ਧਿਆਨ ਵਿੱਚ ਰੱਖਦੇ ਹੋਏ, ਡੋਰ ਕੋਰ ਪਲੇਸਮੈਂਟ ਬਾਕਸ ਟੱਚ ਸਕ੍ਰੀਨ ਦੇ ਨਾਲ ਲੱਗਿਆ ਹੋਇਆ ਹੈ। ਡਿਟੈਕਸ਼ਨ ਮਕੈਨਿਜ਼ਮ, ਡੋਰ ਕੋਰ ਟਾਪ-ਓਪਨਿੰਗ ਬਲੋਇੰਗ ਕੰਪੋਨੈਂਟ, ਵਾਲਵ ਕੋਰ ਉਚਾਈ ਖੋਜ ਕੰਪੋਨੈਂਟ ਅਤੇ ਬਲੈਂਕਿੰਗ ਮਕੈਨਿਜ਼ਮ ਕ੍ਰਮਵਾਰ ਟਰਨਟੇਬਲ ਟੂਲਿੰਗ ਕੰਪੋਨੈਂਟ ਦੇ ਆਲੇ-ਦੁਆਲੇ ਵਿਵਸਥਿਤ ਕੀਤੇ ਗਏ ਹਨ, ਜੋ ਡੋਰ ਕੋਰ ਅਸੈਂਬਲੀ ਦੇ ਅਸੈਂਬਲੀ ਲਾਈਨ ਉਤਪਾਦਨ ਲੇਆਉਟ ਨੂੰ ਮਹਿਸੂਸ ਕਰਦੇ ਹਨ। ਡਿਟੈਕਸ਼ਨ ਸਿਸਟਮ ਮੁੱਖ ਤੌਰ 'ਤੇ ਕੋਰ ਰਾਡ ਡਿਟੈਕਸ਼ਨ, ਇੰਸਟਾਲੇਸ਼ਨ ਉਚਾਈ ਖੋਜ, ਗੁਣਵੱਤਾ ਨਿਰੀਖਣ, ਆਦਿ ਨੂੰ ਪੂਰਾ ਕਰਦਾ ਹੈ, ਜੋ ਨਾ ਸਿਰਫ ਸਮੱਗਰੀ ਚੋਣ ਅਤੇ ਵਾਲਵ ਕੋਰ ਲਾਕ ਦੇ ਆਟੋਮੇਸ਼ਨ ਨੂੰ ਮਹਿਸੂਸ ਕਰਦਾ ਹੈ, ਸਗੋਂ ਅਸੈਂਬਲੀ ਪ੍ਰਕਿਰਿਆ ਦੀ ਸਥਿਰਤਾ ਅਤੇ ਉੱਚ ਕੁਸ਼ਲਤਾ ਨੂੰ ਵੀ ਯਕੀਨੀ ਬਣਾਉਂਦਾ ਹੈ। ਸਿਸਟਮ ਦੀ ਹਰੇਕ ਯੂਨਿਟ ਦੀ ਬਣਤਰ ਚਿੱਤਰ 1 ਵਿੱਚ ਦਿਖਾਈ ਗਈ ਹੈ।.
ਜਿਵੇਂ ਕਿ ਹੇਠਾਂ ਦਿੱਤੀ ਤਸਵੀਰ ਵਿੱਚ ਦਿਖਾਇਆ ਗਿਆ ਹੈ, ਟਰਨਟੇਬਲ ਪੂਰੀ ਪ੍ਰਕਿਰਿਆ ਦਾ ਕੇਂਦਰੀ ਲਿੰਕ ਹੈ, ਅਤੇ ਵਾਲਵ ਕੋਰ ਦੀ ਅਸੈਂਬਲੀ ਟਰਨਟੇਬਲ ਦੀ ਡਰਾਈਵ ਦੁਆਰਾ ਪੂਰੀ ਹੁੰਦੀ ਹੈ। ਜਦੋਂ ਦੂਜਾ ਖੋਜ ਵਿਧੀ ਇਕੱਠੇ ਕੀਤੇ ਜਾਣ ਵਾਲੇ ਹਿੱਸੇ ਦਾ ਪਤਾ ਲਗਾਉਂਦੀ ਹੈ, ਤਾਂ ਇਹ ਨਿਯੰਤਰਣ ਪ੍ਰਣਾਲੀ ਨੂੰ ਇੱਕ ਸਿਗਨਲ ਭੇਜਦੀ ਹੈ, ਅਤੇ ਨਿਯੰਤਰਣ ਪ੍ਰਣਾਲੀ ਹਰੇਕ ਪ੍ਰਕਿਰਿਆ ਯੂਨਿਟ ਦੇ ਕੰਮ ਦਾ ਤਾਲਮੇਲ ਕਰਦੀ ਹੈ। ਪਹਿਲਾਂ, ਵਾਈਬ੍ਰੇਟਿੰਗ ਡਿਸਕ ਦਰਵਾਜ਼ੇ ਦੇ ਕੋਰ ਨੂੰ ਹਿਲਾ ਦਿੰਦੀ ਹੈ ਅਤੇ ਇਸਨੂੰ ਇਨਟੇਕ ਵਾਲਵ ਮੂੰਹ ਵਿੱਚ ਬੰਦ ਕਰ ਦਿੰਦੀ ਹੈ। ਪਹਿਲਾ ਖੋਜ ਵਿਧੀ ਸਿੱਧੇ ਤੌਰ 'ਤੇ ਵਾਲਵ ਕੋਰਾਂ ਦੀ ਜਾਂਚ ਕਰੇਗੀ ਜੋ ਸਫਲਤਾਪੂਰਵਕ ਖਰਾਬ ਸਮੱਗਰੀ ਵਜੋਂ ਸਥਾਪਿਤ ਨਹੀਂ ਕੀਤੇ ਗਏ ਹਨ। ਕੰਪੋਨੈਂਟ 6 ਇਹ ਪਤਾ ਲਗਾਉਂਦਾ ਹੈ ਕਿ ਵਾਲਵ ਕੋਰ ਦੀ ਹਵਾਦਾਰੀ ਯੋਗ ਹੈ ਜਾਂ ਨਹੀਂ, ਅਤੇ ਕੰਪੋਨੈਂਟ 7 ਇਹ ਪਤਾ ਲਗਾਉਂਦਾ ਹੈ ਕਿ ਵਾਲਵ ਕੋਰ ਦੀ ਸਥਾਪਨਾ ਉਚਾਈ ਮਿਆਰ ਨੂੰ ਪੂਰਾ ਕਰਦੀ ਹੈ ਜਾਂ ਨਹੀਂ। ਸਿਰਫ਼ ਉਹ ਉਤਪਾਦ ਜੋ ਉਪਰੋਕਤ ਤਿੰਨ ਲਿੰਕਾਂ ਵਿੱਚ ਯੋਗ ਹਨ, ਨੂੰ ਚੰਗੇ ਉਤਪਾਦ ਬਾਕਸ ਵਿੱਚ ਕੈਪਚਰ ਕੀਤਾ ਜਾਵੇਗਾ, ਨਹੀਂ ਤਾਂ ਉਹਨਾਂ ਨੂੰ ਨੁਕਸਦਾਰ ਉਤਪਾਦਾਂ ਵਜੋਂ ਮੰਨਿਆ ਜਾਵੇਗਾ।
ਦੀ ਬੁੱਧੀਮਾਨ ਅਸੈਂਬਲੀਵਾਲਵ ਕੋਰਸਿਸਟਮ ਡਿਜ਼ਾਈਨ ਦੀ ਤਕਨੀਕੀ ਮੁਸ਼ਕਲ ਹੈ। ਇਸ ਡਿਜ਼ਾਈਨ ਵਿੱਚ, ਇੱਕ ਤਿੰਨ-ਸਿਲੰਡਰ ਡਿਜ਼ਾਈਨ ਅਪਣਾਇਆ ਗਿਆ ਹੈ। ਸਲਾਈਡ ਸਿਲੰਡਰ ਡਿਸਚਾਰਜ ਦੀ ਵਿਲੱਖਣਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਡਿਸਚਾਰਜ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕਰਦਾ ਹੈ; ਦੂਜਾ ਸਿਲੰਡਰ ਇਹ ਯਕੀਨੀ ਬਣਾਉਂਦਾ ਹੈ ਕਿ ਲਾਕ ਰਾਡ ਡਿਸਚਾਰਜ ਹੋਲ ਨਾਲ ਇਕਸਾਰ ਹੈ, ਅਤੇ ਫਿਰ ਲਾਕ ਰਾਡ ਵਿੱਚ ਦਾਖਲ ਹੋਣ ਵਾਲੇ ਵਾਲਵ ਕੋਰ ਨੂੰ ਪੂਰਾ ਕਰਨ ਲਈ ਸਲਾਈਡ ਸਿਲੰਡਰ ਨਾਲ ਸਹਿਯੋਗ ਕਰਦਾ ਹੈ, ਅਤੇ ਫਿਰ ਦੂਜਾ ਸਿਲੰਡਰ ਪੂਰੇ ਲਾਕਿੰਗ ਵਿਧੀ ਨੂੰ ਹਿਲਾਉਣ ਲਈ ਧੱਕਦਾ ਰਹਿੰਦਾ ਹੈ, ਅਤੇ ਚੂਸਣ ਨੋਜ਼ਲ ਟੂਲਿੰਗ ਦੇ ਹੇਠਾਂ ਪਹੁੰਚਣ 'ਤੇ ਵਾਲਵ ਨੂੰ ਚੂਸ ਲਵੇਗਾ। ਅੰਤ ਵਿੱਚ, ਤੀਜਾ ਸਿਲੰਡਰ ਲਾਕਿੰਗ ਵਿਧੀ ਨੂੰ ਜਗ੍ਹਾ 'ਤੇ ਧੱਕਣ ਤੋਂ ਬਾਅਦ, ਸਰਵੋ ਮੋਟਰ ਵਾਲਵ ਕੋਰ ਦੀ ਅਸੈਂਬਲੀ ਨੂੰ ਪੂਰਾ ਕਰਨ ਲਈ ਵਾਲਵ ਕੋਰ ਨੂੰ ਇਨਟੇਕ ਵਾਲਵ ਮੂੰਹ ਵਿੱਚ ਭੇਜਦਾ ਹੈ। ਇਹ ਪ੍ਰਕਿਰਿਆ ਲੰਬਕਾਰੀ ਅਤੇ ਪਾਸੇ ਦੀਆਂ ਗਤੀ ਸਥਿਤੀਆਂ ਦੀ ਸ਼ੁੱਧਤਾ ਅਤੇ ਵਿਲੱਖਣਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਂਦੀ ਹੈ, ਅਤੇ ਦਰਵਾਜ਼ੇ ਦੇ ਕੋਰ ਅਸੈਂਬਲੀ ਦੀਆਂ ਤਕਨੀਕੀ ਮੁਸ਼ਕਲਾਂ ਦਾ ਇੱਕ ਵਧੀਆ ਹੱਲ ਪ੍ਰਦਾਨ ਕਰਦੀ ਹੈ।.
3. ਵਾਲਵ ਕੋਰ ਅਸੈਂਬਲੀ ਸਿਸਟਮ ਦੇ ਮੁੱਖ ਹਿੱਸਿਆਂ ਦਾ ਡਿਜ਼ਾਈਨ
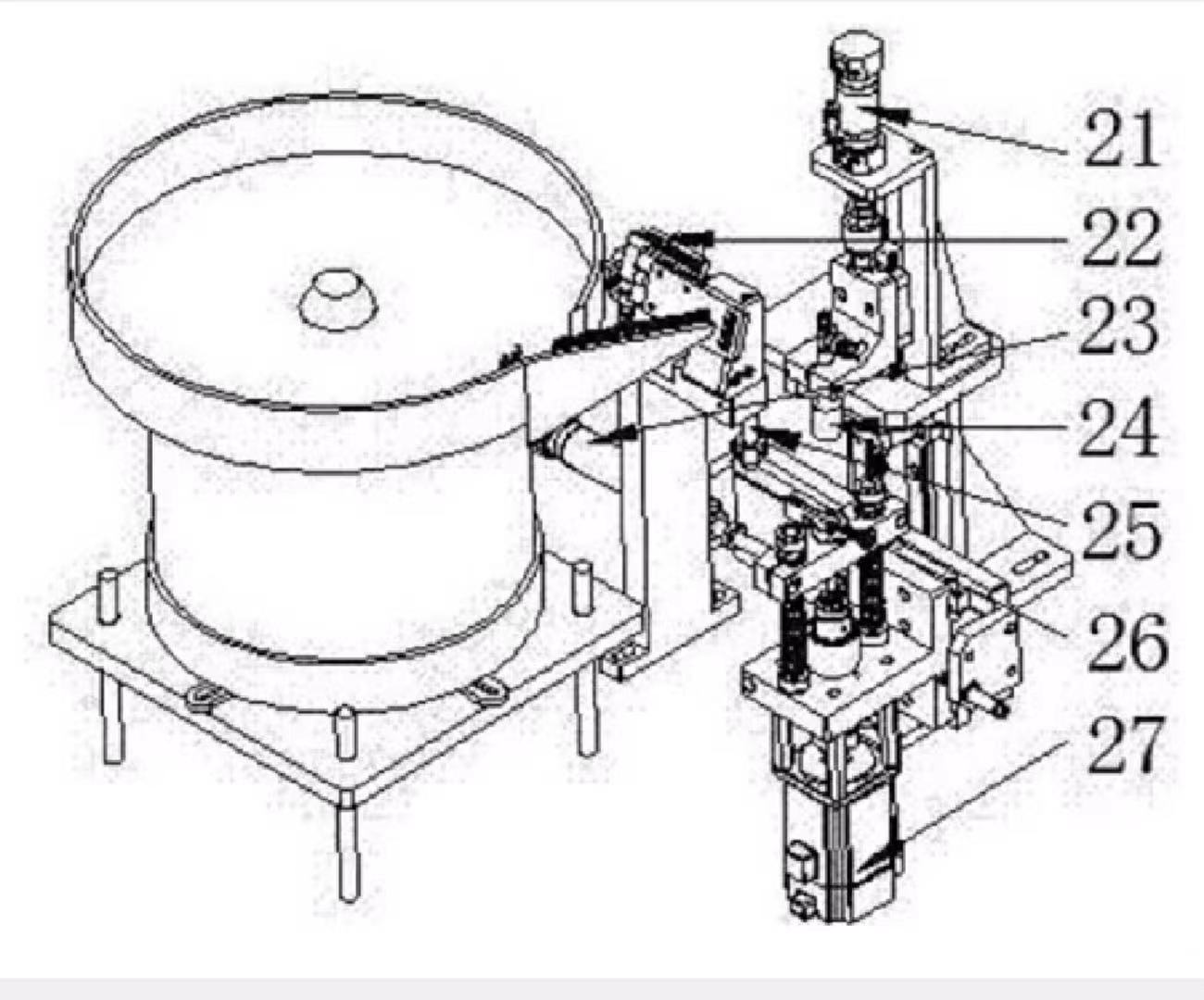
ਇੰਸਟਾਲ ਕਰਨ ਦੀ ਮੁੱਖ ਪ੍ਰਕਿਰਿਆ ਦੇ ਤੌਰ ਤੇਵਾਲਵ ਕੋਰਵਾਲਵ 'ਤੇ, ਵਾਲਵ ਕੋਰ ਨੂੰ ਲਾਕ ਕਰਨ ਲਈ ਵਾਲਵ ਕੋਰ ਦੀ ਗਤੀ ਸਥਿਤੀ ਦੀ ਸ਼ੁੱਧਤਾ 'ਤੇ ਬਹੁਤ ਜ਼ਿਆਦਾ ਜ਼ਰੂਰਤਾਂ ਹੁੰਦੀਆਂ ਹਨ, ਇਸ ਲਈ ਇਸਨੂੰ ਪੂਰਾ ਕਰਨ ਲਈ ਲੰਬਕਾਰੀ ਅਤੇ ਪਾਸੇ ਦੇ ਵਿਧੀਆਂ ਦੇ ਤਾਲਮੇਲ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ। ਇਸ ਹਿੱਸੇ ਦੇ ਡਿਜ਼ਾਈਨ ਵਿੱਚ, ਇਸਨੂੰ ਇੱਕ ਸਿੰਗਲ ਕਿਰਿਆ ਵਿੱਚ ਵੰਡਿਆ ਜਾਂਦਾ ਹੈ, ਵਾਲਵ ਕੋਰ ਦੀ ਡਿਸਚਾਰਜਿੰਗ ਕਿਰਿਆ, ਲਾਕਿੰਗ ਲੀਵਰ ਦੀ ਲਾਕਿੰਗ ਕਿਰਿਆ ਅਤੇ ਵਾਲਵ ਨੋਜ਼ਲ 'ਤੇ ਵਾਲਵ ਕੋਰ ਨੂੰ ਲੋਡ ਕਰਨ ਦੀ ਕਿਰਿਆ। ਇਸਦੀ ਮਕੈਨੀਕਲ ਬਣਤਰ ਚਿੱਤਰ 2 ਵਿੱਚ ਦਿਖਾਈ ਗਈ ਹੈ। ਜਿਵੇਂ ਕਿ ਚਿੱਤਰ 2 ਤੋਂ ਦੇਖਿਆ ਜਾ ਸਕਦਾ ਹੈ, ਵਾਲਵ ਕੋਰ ਅਸੈਂਬਲੀ ਦੀ ਮਕੈਨੀਕਲ ਬਣਤਰ ਨੂੰ ਤਿੰਨ ਹਿੱਸਿਆਂ ਵਿੱਚ ਵੰਡਿਆ ਗਿਆ ਹੈ। ਤਿੰਨ ਹਿੱਸੇ ਇੱਕ ਦੂਜੇ ਨੂੰ ਪ੍ਰਭਾਵਿਤ ਕੀਤੇ ਬਿਨਾਂ ਤਾਲਮੇਲ ਵਿੱਚ ਕੰਮ ਕਰਦੇ ਹਨ। ਜਦੋਂ ਸੁਤੰਤਰ ਕਾਰਵਾਈ ਪੂਰੀ ਹੋ ਜਾਂਦੀ ਹੈ, ਤਾਂ ਸਿਲੰਡਰ ਅਗਲੀ ਅਸੈਂਬਲੀ ਸਥਿਤੀ 'ਤੇ ਜਾਣ ਲਈ ਵਿਧੀ ਨੂੰ ਧੱਕਦਾ ਹੈ।
ਚਲਦੀ ਸਥਿਤੀ ਦੀ ਸ਼ੁੱਧਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ, 1.4mm ਦੇ ਅੰਦਰ ਗਲਤੀ ਨੂੰ ਕੰਟਰੋਲ ਕਰਨ ਲਈ ਇਲੈਕਟ੍ਰੀਕਲ ਕੰਟਰੋਲ ਅਤੇ ਮਕੈਨੀਕਲ ਸੀਮਾ ਦੇ ਵਿਆਪਕ ਡਿਜ਼ਾਈਨ ਨੂੰ ਅਪਣਾਇਆ ਜਾਂਦਾ ਹੈ। ਵਾਲਵ ਕੋਰ ਅਤੇ ਵਾਲਵ ਨੋਜ਼ਲ ਦਾ ਕੇਂਦਰ ਕੋਐਕਸੀਅਲ ਹਨ, ਤਾਂ ਜੋ ਸਰਵੋ ਮੋਟਰ ਵਾਲਵ ਕੋਰ ਨੂੰ ਵਾਲਵ ਨੋਜ਼ਲ ਵਿੱਚ ਸੁਚਾਰੂ ਢੰਗ ਨਾਲ ਧੱਕ ਸਕੇ, ਨਹੀਂ ਤਾਂ ਇਹ ਹਿੱਸਿਆਂ ਨੂੰ ਨੁਕਸਾਨ ਪਹੁੰਚਾਏਗਾ। ਮਕੈਨੀਕਲ ਢਾਂਚੇ ਦਾ ਰੁਕਣਾ ਜਾਂ ਬਿਜਲੀ ਸਿਗਨਲਾਂ ਦੀਆਂ ਅਸਧਾਰਨ ਦਾਲਾਂ ਅਸੈਂਬਲੀ ਦੇ ਕੰਮ ਵਿੱਚ ਮਾਮੂਲੀ ਭਟਕਣਾ ਦਾ ਕਾਰਨ ਬਣ ਸਕਦੀਆਂ ਹਨ। ਨਤੀਜੇ ਵਜੋਂ, ਵਾਲਵ ਕੋਰ ਨੂੰ ਇਕੱਠਾ ਕਰਨ ਤੋਂ ਬਾਅਦ, ਹਵਾਦਾਰੀ ਪ੍ਰਦਰਸ਼ਨ ਮਿਆਰੀ ਨਹੀਂ ਹੁੰਦਾ, ਅਤੇ ਅਸੈਂਬਲੀ ਉਚਾਈ ਯੋਗ ਨਹੀਂ ਹੁੰਦੀ, ਜਿਸ ਨਾਲ ਉਤਪਾਦ ਦੀ ਅਸਫਲਤਾ ਹੁੰਦੀ ਹੈ। ਇਸ ਕਾਰਕ ਨੂੰ ਸਿਸਟਮ ਡਿਜ਼ਾਈਨ ਵਿੱਚ ਪੂਰੀ ਤਰ੍ਹਾਂ ਵਿਚਾਰਿਆ ਜਾਂਦਾ ਹੈ, ਖਰਾਬ ਉਤਪਾਦਾਂ ਨੂੰ ਛਾਂਟਣ ਲਈ ਹਵਾ ਦੇ ਝਟਕੇ ਦੀ ਖੋਜ ਅਤੇ ਉਚਾਈ ਖੋਜ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।.
ਪੋਸਟ ਸਮਾਂ: ਸਤੰਬਰ-09-2022
